PID控制器闭环系统工作原理
- 更新时间:2024年12月24日
- 图形对象数:14
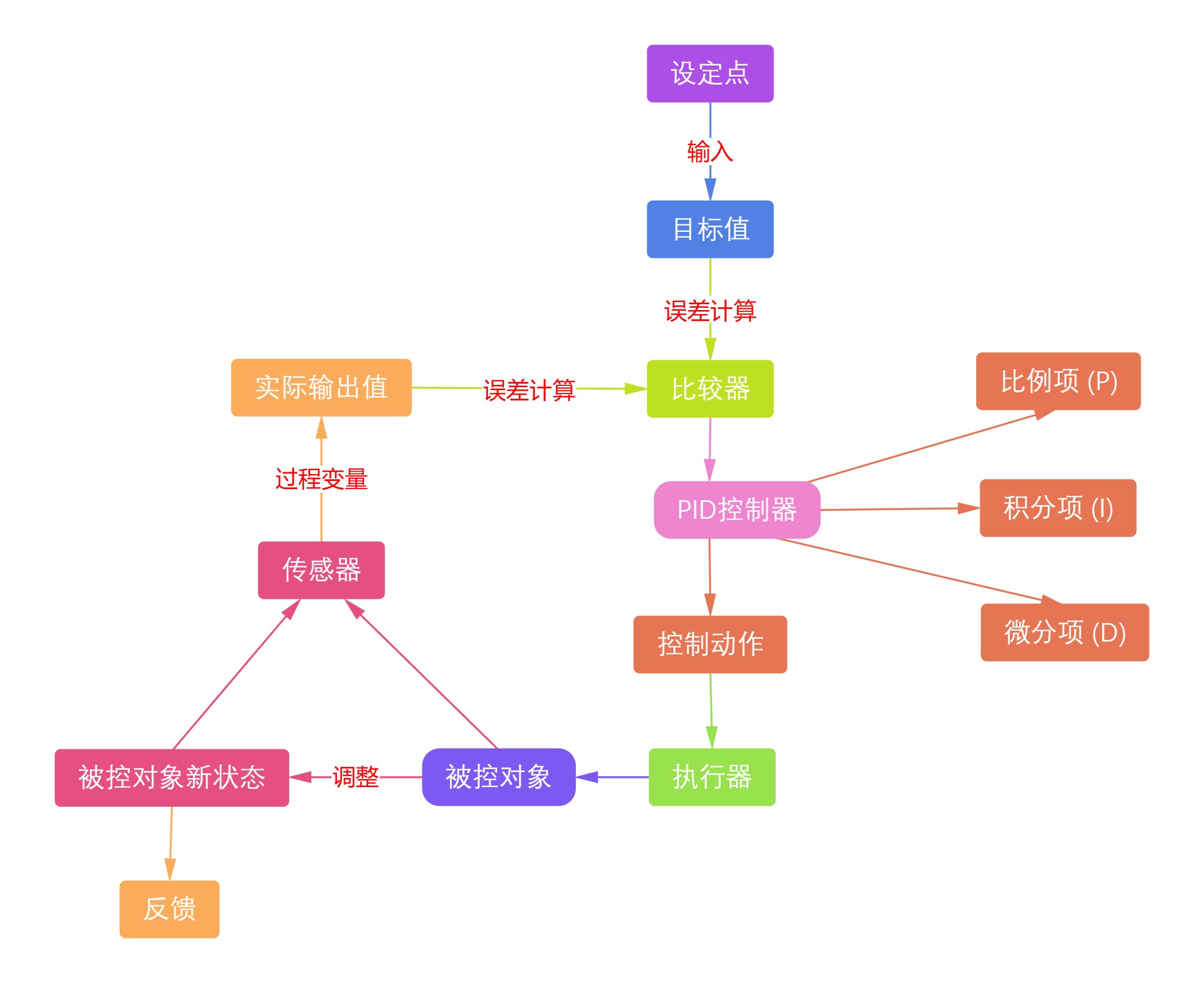
摘要:关系图通过图形天下展示了PID控制器闭环系统的运作流程,实现了关系数据的可视化。从设定点到目标值的输入,再到传感器测量的实际输出值,整个系统通过比较器计算误差,并利用PID控制器(包含比例、积分和微分项)生成控制动作。执行器根据这些动作调整被控对象的状态,新状态再次被传感器测量并反馈,形成闭环控制。这一图形化的描述清晰地展现了闭环系统中各组件之间的互动关系。
设定点:这是控制系统希望达到的目标值。
目标值:设定点输入的目标值,通过“输入”箭头连接到“比较器”。
传感器:用于测量系统实际运行状态的装置。
实际输出值:过程变量的具体数值,描述传感器测量的实际输出值。
比较器:比较目标值和实际输出值来计算误差信号,通过“误差计算”箭头接收两个输入。
PID控制器:根据比较器计算出的误差信号,PID控制器决定如何调整控制动作。它包含三个主要部分:比例项(P)、积分项(I)和微分项(D)。
控制动作:PID控制器输出的控制指令,用来调整执行器的动作。
执行器:接收控制动作,并将其转化为对被控对象的实际操作。
被控对象:系统试图控制的对象,其状态会因执行器的操作而改变。
被控对象新状态:执行器操作后被控对象的状态变化。
反馈:被控对象新状态的一部分作为反馈回到传感器,形成闭环控制。
比例项 (P)、积分项 (I)、微分项 (D):这些是构成PID控制器的核心部分,分别对应于PID算法中的不同功能:
- 比例项(P):根据当前误差直接调整控制量。
- 积分项(I):消除静态误差,确保长期精度。
- 微分项(D):预测未来趋势,提高系统的响应速度。
设定点→目标值:设定点指的是系统期望达到的目标值。这个值传递到目标值,作为系统期望实现的标准。
传感器→实际输出值:传感器用于测量系统的实际输出。实际输出值是传感器测量得到的数据,代表当前系统的实际状态。
目标值→比较器:目标值作为参考值,传递给比较器,以便与实际输出值进行比较。
实际输出值→比较器:实际输出值同样传递给比较器,用于与目标值进行比较,从而计算误差。
比较器→PID控制器:比较器计算出的误差信号传递给PID控制器,PID控制器根据这个误差信号来决定如何调整系统。
PID控制器→控制动作:PID 控制器根据误差信号计算出所需的控制动作,以调整系统使其更接近目标值。
控制动作→执行器:控制动作被传递给执行器,执行器根据控制动作调整系统的实际操作。
执行器→被控对象:执行器对被控对象进行实际的调整,以改变其状态。
被控对象→传感器:被控对象经过调整后的状态由传感器再次测量,形成闭环反馈。
被控对象→被控对象新状态:执行器的作用导致被控对象达到一个新的状态。
被控对象新状态→传感器:新状态再次被传感器测量,并反馈到系统中。
被控对象新状态→反馈:新状态作为反馈信息,返回到系统的输入端,用于下一轮的比较和调整。
PID控制器→比例项:PID 控制器包含比例项,用于根据当前误差的大小调整输出。
PID控制器→积分项:PID 控制器包含积分项,用于累积过去的误差,以消除静态误差。
PID控制器→微分项:PID 控制器包含微分项,用于预测未来的误差变化趋势,并作出快速反应。
关系图展示了一个典型的PID(比例-积分-微分)控制器闭环系统的运作流程。在这个系统中,各个组件通过信息流相互连接,形成了一个闭环控制回路。
首先,系统有一个设定点,即期望达到的目标值。传感器不断测量系统的实际输出值,并将这些数据传送给比较器。比较器负责计算目标值与实际输出值之间的误差,并将此误差信号传递给PID控制器。
PID控制器根据接收到的误差信号,利用比例项(P)、积分项(I)和微分项(D)来计算出一个合适的控制动作。比例项(P)根据当前误差的大小来调整输出;积分项(I)累积过去的误差,以消除静态误差;微分项(D)则预测未来的误差变化趋势,并作出快速反应。
接下来,PID控制器计算出的控制动作被发送到执行器。执行器根据控制动作调整被控对象,使其状态发生变化。调整后的被控对象新状态再次被传感器测量,并作为反馈传回系统。这样,系统可以不断调整自身,使得实际输出更加接近设定的目标值。
整个闭环控制系统通过不断的测量、比较、调整和反馈,确保系统能够稳定且精确地达到预期的目标。这种闭环控制机制广泛应用于各种自动控制系统中,如工业自动化、汽车控制系统等,以实现高效、稳定的运行。






